이 튜토리얼은 크게 3부분(Client, Server, Log Handler)으로 나뉩니다.
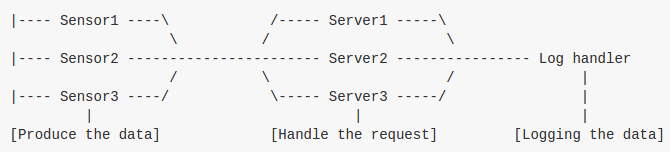
기본적인 플로우는 위와 같으며 클라이언트에서 센서들이 데이터를 생성하면 이를 서버로 전송하고 서버는 이 데이터를 로깅하여 저장합니다.
위에서 보이는 Sensor는 우리가 구현할 가상의 센서로 아래의 3가지 센서들이 존재합니다.
- 자이로 센서 (Gyroscope Sensor)
- 가속도 센서 (Accelometer Sensor)
- 온도 및 습도계 (Temperature Sensor)
이들 센서의 종류는 잠시 후 설명할 models 패키지에 정의되어 있으며, 센서들은 일정 시간 간격마다 Server에게 Sensor에서 발생한 측정값을 보내줍니다. 이 측정값으로는 각속도(Angle Velocity), 선속도(Gravitational Velocity), 온도 및 습도(Temperature and Humidity)가 있습니다.
그러나, 우리는 가상의 센서를 구현하는 것이기 때문에, 실제 측정값을 넣지 못하므로 faker라는 랜덤 생성기를 사용하여, 랜덤값을 서버에 보내줄 것입니다.
Server는 각 Sensor에서 발생한 값을 HTTP를 통해 전달 받습니다. 이 때, 각 센서는 서로 다른 서버 포트 번호로 데이터를 전송하며 Server는 받은 데이터를 통해 센서의 종류를 판별하고 값들을 로깅합니다.
로깅할 데이터는 Log Handler에게 넘겨지며, 이를 받은 Log Handler는 실시간으로 각 Sensor가 받은 센서값을 log 폴더의 센서별 파일에 로그 형식으로 남깁니다.
전체 튜토리얼의 구조는 다음과 같습니다.
go-codelab/
faker/
range.go
models/
sensor.go
sensor_client.go
sensor_server.go